Inspired by one of nature’s most efficient swimmers, bio-roboticist Auke Ijspeert and his team are building a sinuous robot that can venture into toxic waters.
Let’s say you wanted to build a robot that was the most efficient swimmer possible. You’d probably try to take inspiration from nature, copying the best moves from a fish. But which of the more than 27,000 fish species should you focus on? The lamprey and the eel, as it turns out. These two slithery elongated fish are the Michael Phelps of the piscine world: they move efficiently while expending a very low amount of energy. And they’re the inspiration for the Envirobot, an experimental swimming robot that may someday allow scientists to detect and monitor pollutants in toxic bodies of water.
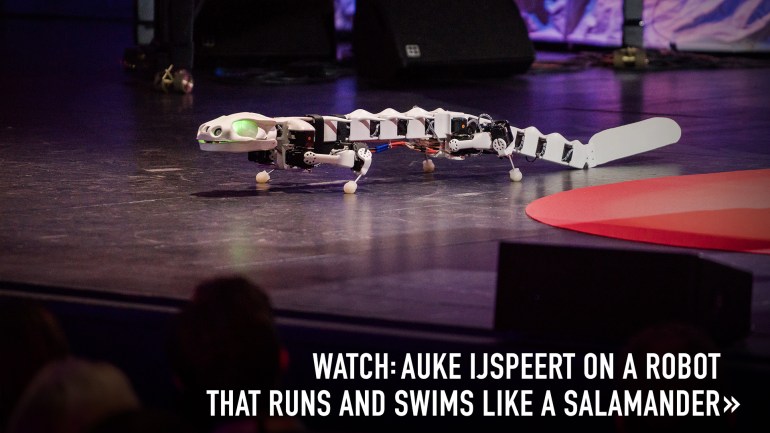
The Envirobot is the creation of a team led by Swiss roboticist Auke Ijspeert. Ijspeert (TED Talk: A robot that runs and swims like a salamander) is a professor at the École Polytechnique Fédérale de Lausanne (EPFL). He works in biorobotics, which draws inspiration from the animal world to develop new robots and uses such robots as a way to better understand living organisms; researchers in the field are also building biologically influenced devices that assist humans. “Animals are amazing,” says Ijspeert. “They are so good at locomotion and there are many things we can really take inspiration from and bring to engineering.”
Ijspeert was fascinated by the unique way in which lampreys and eels swim. They undulate, using their muscles to make a sinuous wavelike motion with their entire bodies. While most animals — including humans — swim by pushing against water, the undulations of eels and lampreys generate low-pressure zones in the bends of their bodies, creating a suction that pushes them forward with a minimum of effort. He and his team designed a robot called Amphibot that mimicked this kind of movement. They made a key design decision early on — instead of building one long machine, they built the robot out of detachable segments, so they could customize its length for different tasks. Upon hearing about the Amphibot, University of Lausanne biochemist Jan Roelof van der Meer approached Ijspeert and proposed they create a pollution-detecting robot together.

The autonomous Envirobot is roughly five feet long (yep, that’s one big eel). It can either be controlled by researchers from the shore or programmed to move on its own to pinpoint the source of pollution. The head module, which houses all the computing power, coordinates the movement of its components. The other modules are equipped with a variety of different sensors. As it swims, the sensors take measurements and send real-time data to a computer, which makes collecting data a quicker process than the traditional method of setting up sampling stations at scattered locations. The Envirobot can also collect up to three water samples at different points. The group has tested Envirobot in the lab and in nearby Lac Léman.
Here’s one super-cool feature: Envirobot relies on biological sensors — or real living organisms — to check the water. One sensor uses bacteria that researchers developed to emit light when exposed to mercury. “The intensity of the light is proportional to the intensity of the mercury in the water,” says Behzad Bayat, one of the engineers on the Envirobot team. Another sensor has two compartments that contain a tiny crustacean called daphnia: one is filled with clean water (the control group) and the other is filled with the water to be analyzed. Normally, the daphnia are continually swimming, but their movement changes when exposed to pollution. By comparing the movement of the control group and the group exposed to the water, researchers can gauge how toxic the water is. Yet another sensor relies on fish cells growing directly on electrodes. When the cells come into contact with pollutants, they no longer touch each other, which creates a measurable change in the flow of electricity.

A major advantage of the Envirobot is its portability. It can be easily transported, a feature that could make it useful in emergencies like chemical spills or natural disasters. “The ultimate goal is to have a system where not only a single robot but maybe ten robots could collectively create a map of pollution,” Ijspeert says. He envisions another use for similar types of aquatic robots as well: after a flood, they could help detect which buildings are still stable. However, all of these applications are speculative, Ijspeert cautions, and Envirobot is still just a prototype.“There might be cheaper solutions,” he says, “but I think it’s worth researching to see how we can push the limits.”